Gesture Recognition in Video
Simultaneous Localization and Mapping (SLAM)
Multiple Object Tracking (using Kalman Filter Bank lol)
Panoramic Image Generation (Penn State Thor Dataset)
Quaternion State Estimation Using Unscented Kalman Filter
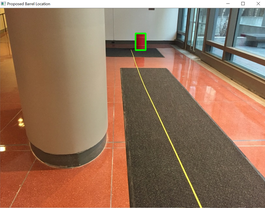
Gaussian Classifier for barrel detection
Manual Labeling
|
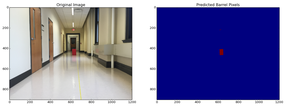
Color Discriminating Gaussian Classifier
|
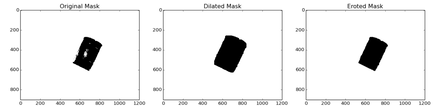
Polymorphic Operations and Contouring
|
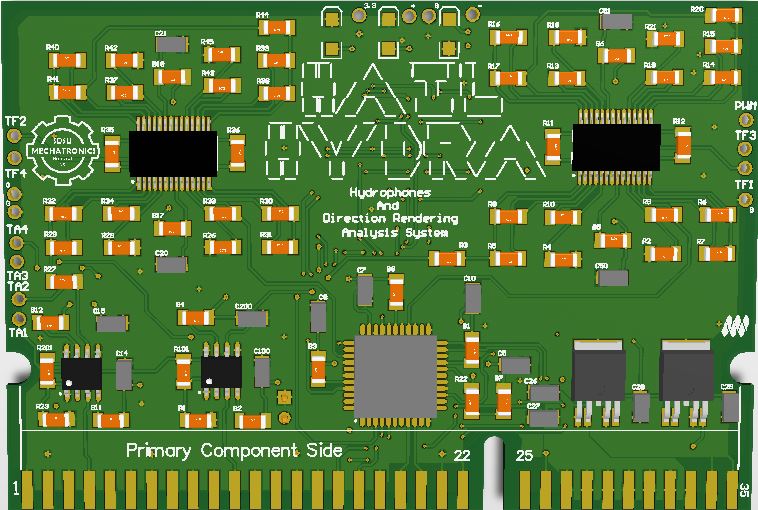
4 Layer Mixed Signal PCB
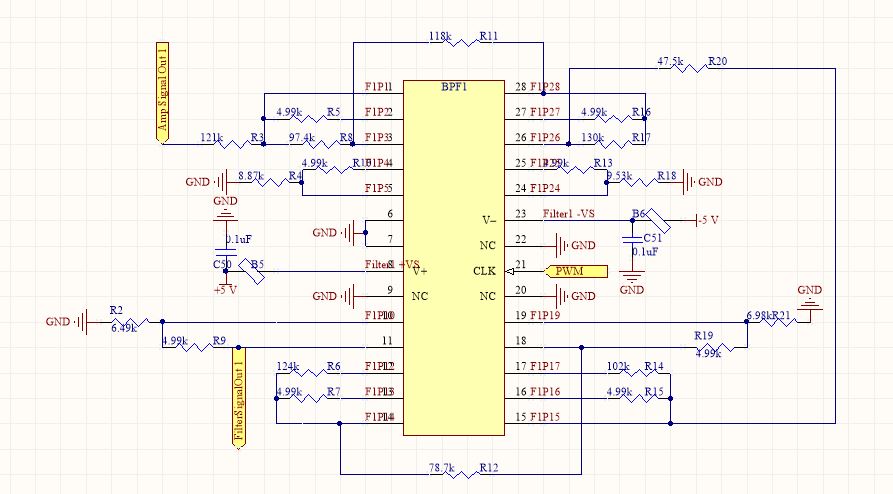
Schematic design and simulation |

Prototyping |
PCB design, triple split power layer and top solder |
Finalize PCB layout |
|
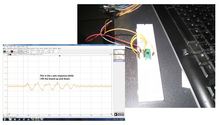
Over the past year I have been a member of a team competing in the AUVSI robosub competition. Here I have designed a custom PCB to condition signals received from hydrophones and process them in a uP to determine direction of arrival. The PCB design was done in Altium designer, parts where prototyped using standard lab test equipment.
|
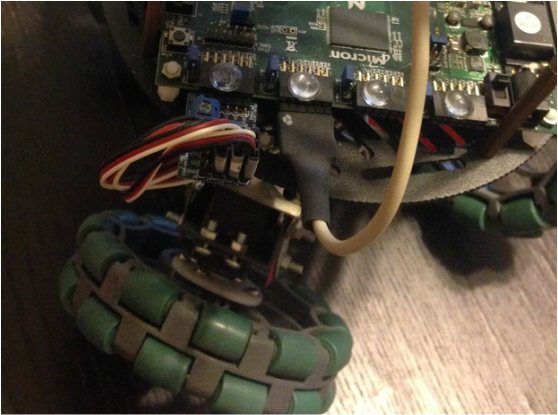
Ball Balancing Robot
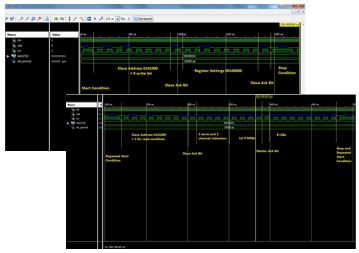
I2C Driver in VHDL |
Prototyping |
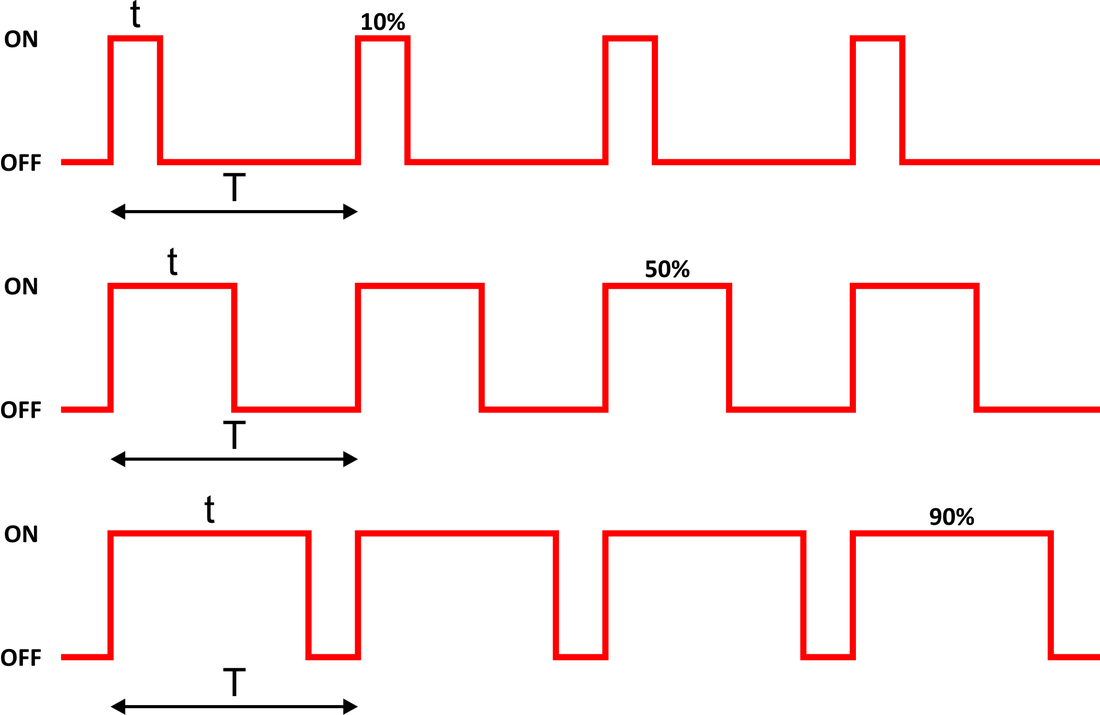
Sensor Data into PWM generator |
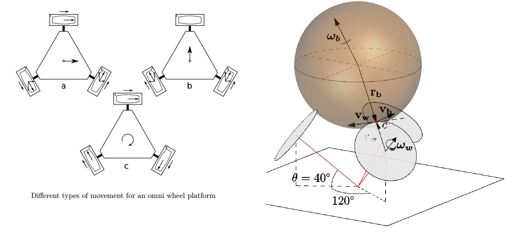
Motion Control Algorithm |
|
I used a Nexus 2 FPGA development board as a robotics platform. Here I wrote custom drivers for I2C in VHDL to take sensor data from accelerometers and gyroscopes. I fed them through a simplified Kalman filter to estimate current position and direction which I used as an input to a servo control algorithm to re-balance the robot.
|

